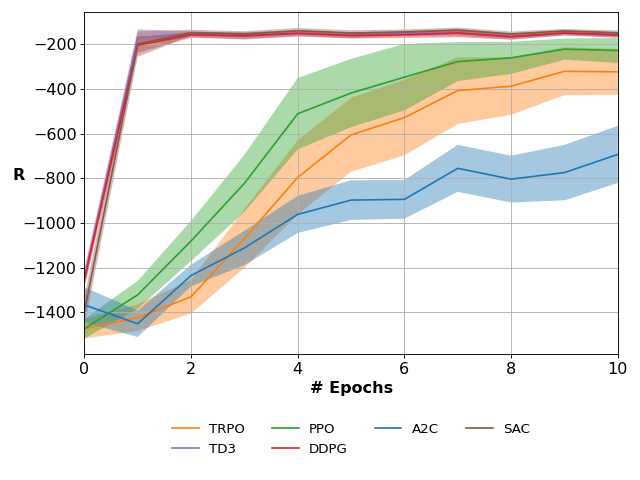
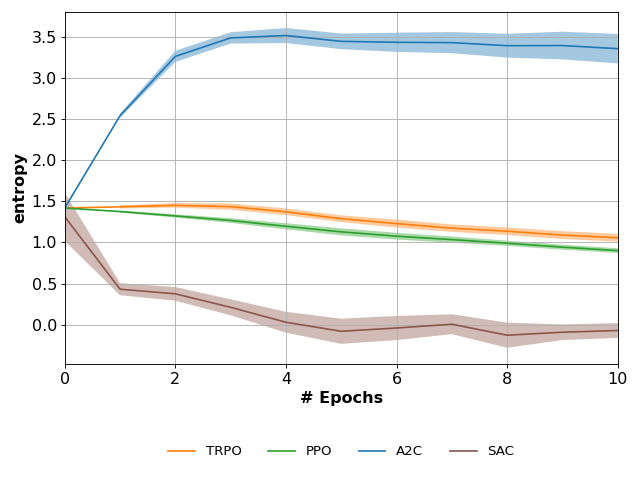
Gym Control Environments Benchmarks
Run Parameters |
|
n_runs |
25 |
n_epochs |
10 |
n_steps |
30000 |
n_episodes_test |
10 |
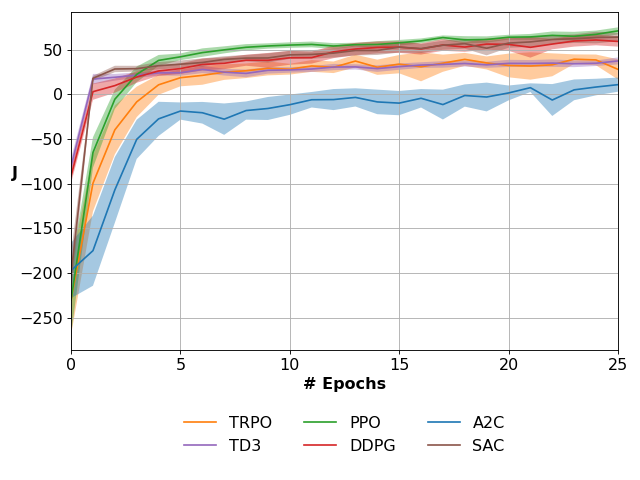
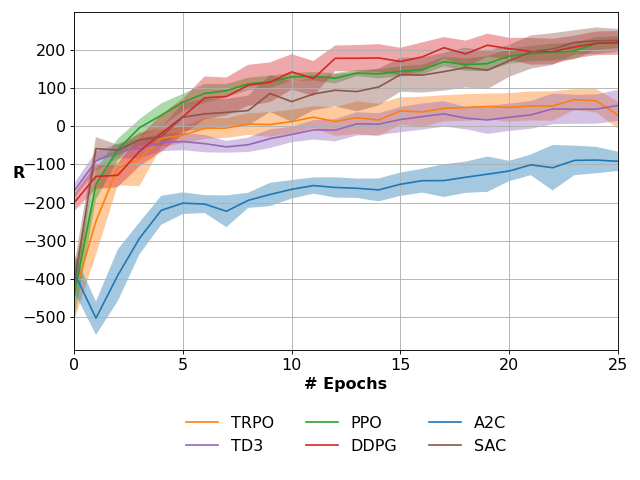
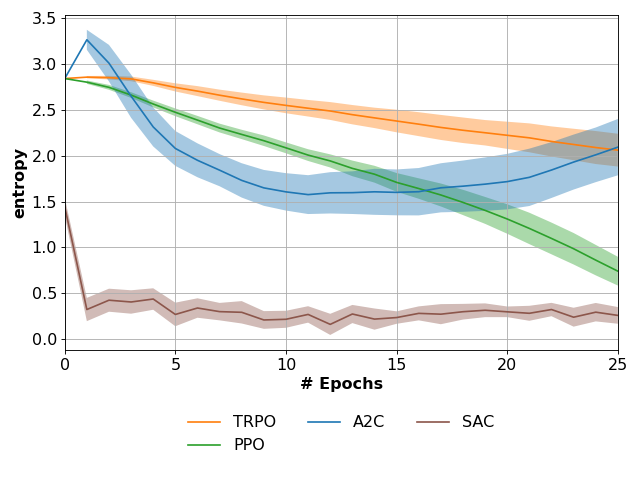
Pendulum-v0
A2C:
actor_lr: 0.0007
batch_size: 64
critic_lr: 0.0007
critic_network: A2CNetwork
ent_coeff: 0.01
eps_actor: 0.003
eps_critic: 1.0e-05
max_grad_norm: 0.5
n_features: 64
preprocessors: null
DDPG:
actor_lr: 0.0001
actor_network: DDPGActorNetwork
batch_size: 64
critic_lr: 0.001
critic_network: DDPGCriticNetwork
initial_replay_size: 128
max_replay_size: 1000000
n_features:
- 64
- 64
tau: 0.001
PPO:
actor_lr: 0.0003
batch_size: 64
critic_fit_params: null
critic_lr: 0.0003
critic_network: TRPONetwork
eps: 0.2
lam: 0.95
n_epochs_policy: 4
n_features: 32
n_steps_per_fit: 3000
preprocessors: null
SAC:
actor_lr: 0.0001
actor_network: SACActorNetwork
batch_size: 64
critic_lr: 0.0003
critic_network: SACCriticNetwork
initial_replay_size: 128
lr_alpha: 0.0003
max_replay_size: 500000
n_features: 64
preprocessors: null
target_entropy: null
tau: 0.001
warmup_transitions: 128
TD3:
actor_lr: 0.0001
actor_network: TD3ActorNetwork
batch_size: 64
critic_lr: 0.001
critic_network: TD3CriticNetwork
initial_replay_size: 128
max_replay_size: 1000000
n_features:
- 64
- 64
tau: 0.001
TRPO:
batch_size: 64
cg_damping: 0.01
cg_residual_tol: 1.0e-10
critic_fit_params: null
critic_lr: 0.0003
critic_network: TRPONetwork
ent_coeff: 0.0
lam: 0.95
max_kl: 0.01
n_epochs_cg: 100
n_epochs_line_search: 10
n_features: 32
n_steps_per_fit: 3000
preprocessors: null
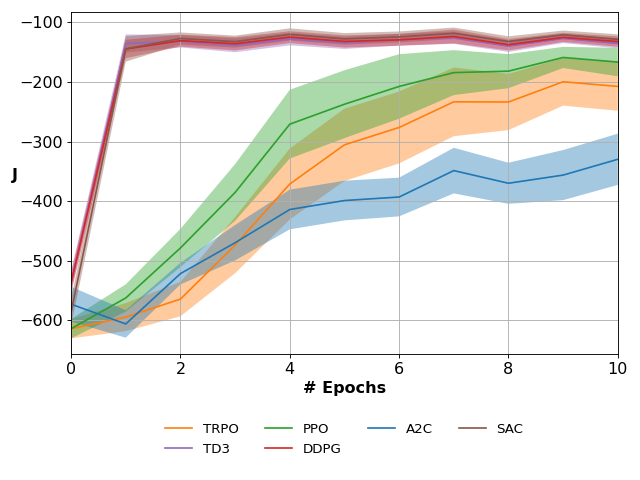
LunarLanderContinuous-v2
A2C:
actor_lr: 0.0007
batch_size: 64
critic_lr: 0.0007
critic_network: A2CNetwork
ent_coeff: 0.01
eps_actor: 0.003
eps_critic: 1.0e-05
max_grad_norm: 0.5
n_features: 64
preprocessors: StandardizationPreprocessor
DDPG:
actor_lr: 0.0001
actor_network: DDPGActorNetwork
batch_size: 64
critic_lr: 0.001
critic_network: DDPGCriticNetwork
initial_replay_size: 128
max_replay_size: 1000000
n_features:
- 64
- 64
tau: 0.001
PPO:
actor_lr: 0.0003
batch_size: 64
critic_fit_params: null
critic_lr: 0.003
critic_network: TRPONetwork
eps: 0.2
lam: 0.95
n_epochs_policy: 4
n_features: 32
n_steps_per_fit: 3000
preprocessors: StandardizationPreprocessor
SAC:
actor_lr: 0.0001
actor_network: SACActorNetwork
batch_size: 64
critic_lr: 0.0003
critic_network: SACCriticNetwork
initial_replay_size: 128
lr_alpha: 0.0003
max_replay_size: 500000
n_features: 64
preprocessors: null
target_entropy: null
tau: 0.005
warmup_transitions: 128
TD3:
actor_lr: 0.0001
actor_network: TD3ActorNetwork
batch_size: 64
critic_lr: 0.001
critic_network: TD3CriticNetwork
initial_replay_size: 128
max_replay_size: 1000000
n_features:
- 64
- 64
tau: 0.001
TRPO:
batch_size: 64
cg_damping: 0.01
cg_residual_tol: 1.0e-10
critic_fit_params: null
critic_lr: 0.03
critic_network: TRPONetwork
ent_coeff: 0.0
lam: 0.95
max_kl: 0.01
n_epochs_cg: 100
n_epochs_line_search: 10
n_features: 32
n_steps_per_fit: 3000
preprocessors: StandardizationPreprocessor